
TIM THE DAKOL 115 PROJECT BERTANDING DI TECHNOCORNER 2014
Technocorner 2014 dengan tema Melukis Wajah Bangsa Melalui IPTEK adalah sebuah acara yang dipersembahkan oleh Keluarga Mahasiswa Teknik Elektro &Teknologi Informasi (KMTETI) Universitas Gadjah Mada (UGM). Technocoener sendiri merupakan rangkaian acara kelas regional Jawa tahunan yang diadakan oleh KMTETI UGM. Technocorener 2014 terdiri dari berbagai rangkaian acara, yakni Seminar Nasional, Line Follower Competition, Software Development Competition, Electrical Engineering Competition, dan Techno Expo.


Tim The Dakol 115 Project dari Teknik Elektro Telkom University memutuskan untuk bergabung dalam kompetisi Line Following Robot. Tim ini beranggotakan Iyodha Amanda, Afrursah Satrio, dan Leonardus Priyoprahasto. Tim ini dibentuk atas dasar kesamaan minat pada robotika dan keinginan berkompetisi. Nama tim ini terinspirasi dari The Manhattan Project, Proyek Nuklir Amerika pada Perang Dunia II. Manhattan diganti dengan Dakol 115 karena 115 adalah NIM mahasiswa teknik elektro Tel-U dan Dakol adalah singkatan dari Dayeuh Kolot. Harapan dari nama tim ini adalah tim mampu mengguncangkan Technocorner, kemudian dunia.
Pembuatan robot dilakukan di lab Pengukuran Besaran Elektrik, karena memang lab ini memfasilitasi mahasiswa yang sedang mengerjakan tugas besar, tugas akhir, maupun persiapan lomba. Persiapan intensif dilakukan pada dua minggu menjelang lomba.
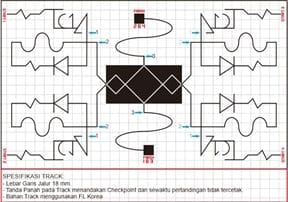
Track Penyisihan
Hal pertama yang dipersiapkan adalah proximity atau sensor pembacaan garis, inti dari robot yang akan dibuat oleh tim. Pembaca garis dibuat dengan menggunakan pasangan LED dan Photodioda. Prinsip kerjanya adalah pada saat LED memancarkan sinar, sinarnya akan dipantulkan lantai dan akan diterima oleh Photodioda. Cahaya yang dipantulkan oleh lantai berwarna hitam dan putih tentu berbeda karena terjadi penyerapan cahaya pada warna hitam. Intensitas cahaya yang berbeda tersebut menjadi acuan tim akan penentuan garis mana yang harus diikuti. Tim memasang 8 buah LED di bagian depan robot sekaligus untuk membaca simpangan dan tikungan.
Kedua adalah perancangan system minimum mikrokontroler ATMega32 SMD. ATMega32 SMD dipilih karena komponen pembentuk ATMega32 SMD lebih tahan panas, lebih ringan secara bobot, dan lebih hemat energy baterai. Ketiga adalah perancangan driver motor untuk memberi PWM (Pulse Width Modulation) pada motor kiri dan motor kanan. Pemberian PWM pada motor kiri dan kanan berfungsi untuk membelokkan robot ke kiri maupun ke kanan. Keempat adalah mendesain PCB sekaligus tubuh dari robot itu sendiri. Terakhir adalah pemrograman ATMega32 untuk membuat robot bekerja seperti fungsinya, yaitu Line Following Robot, robot pengikut garis. Robot ini kemudian kami beri nama Blue Shark 1.0.
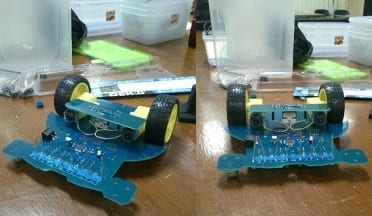
Blue Shark 1.0
Setelah selesai mengikuti UTS hari terakhir pada tanggal 4 April sore, tim berangkat menggunakan kereta Kahuripan jurusan Bandung – Jogjakarta pada malam hari. Nasib malang untuk tim, kereta Malabar, yang jam keberangkatannya 2 kereta sebelum Kahuripan, anjlok di sekitar Tasik. Kejadian ini menyebabkan kereta Kahuripan harus mundur kembali ke Bandung dan memutar jalur melewati jalur Utara. Kejadian ini membuat prediksi jam dari tim meleset lebih dari 4 jam lamanya. Keadaan ini membuat tim kehilangan hak bertanding pada 1 kali babak penyisihan.
Tim sampai di Jogjakarta sekitar pukul 10 pagi, dari stasiun, tim langsung berangkat menuju UGM. Di sana tim dijemput oleh LO dan dikabarkan bahwa kemungkinan tim untuk lolos sudah mengecil karena kesempatan bertanding pada babak penyisihan hanya dua kali. Tim tidak berkecil hati dan tetap menyiapkan robot untuk babak kedua penyisihan. Namun hal yang baru disadari oleh tim adalah selama perjalanan menuju Jogjakarta terdapat kerusakan komponen pada resistor dan mikrokontroler. Kerusakan tersebut membuat robot Blue Shark 1.0 tidak dapat membaca garis.
Dalam sela waktu yang sempit, tim mencoba memperbaiki robot tersebut dengan mengganti resistor dan menambah system minimum ATMega8535 agar dapat membaca garis. Namun belum selesai diperbaiki tim sudah dipanggil untuk bertanding. Alhasil, tim mengalami kekalahan karena robot dapat berjalan namun tidak sesuai dengan fungsinya, yaitu membaca garis. Dengan ini, gugurlah Tim The Dakol 115 Project dalam Jogja under attack ini. Namun tim tidak menyerah, masih banyak lomba Line Follower yang dapat diikuti dan kami yakin kami dapat menang pada kesempatan berikutnya.






